- ГЛАВНАЯ >
- ТОВАРЫ >
- Технические новинки >
- Vol.30: Новая функция системы роботной сварки ARCMAN™: считывание зазора в вершине разделки с помощью лазерного датчика
Технические новинки Vol.30
Vol.30: Новая функция системы роботной сварки ARCMAN™: считывание зазора в вершине разделки с помощью лазерного датчика

1.Предисловие
Системы роботной сварки ARCMAN™ компании KOBE STEEL применяются многими пользователями в строительстве и станкостроении - отраслях, где ведется обработка стальных пластин средней и большой толщины, что показано на Иллюстрациях 1 и 2. Одно из преимуществ систем роботной сварки заключается в том, что они позволяют повысить производительность. Однако, чтобы достичь этого в процессе сварки, важно уменьшить тактовое время, сохраняя при этом качество сварочных работ. Робот просто выполняет операцию по заданным оператором параметрам, однако в зависимости от состояния свариваемых деталей и/или кромок, он иногда оказывается неспособен выполнить точную сварку в определенных условиях. В результате могут возникать дефекты сварки, так как в крупных сооружениях, в которых использованы стальные пластины средней и большой толщины, возможны искажения и/или ошибки при монтаже. Это вызывает необходимость ремонта на послесварочном этапе, что, в свою очередь, приводит к общему снижению производительности. Во время работы сварщик внимательно следит за формой свариваемых деталей и/или зазором в вершине разделки, соответственно корректируя процесс. Следовательно, чтобы робот мог выполнить качественную сварку, ему необходима способность видеть.

Иллюстрация 1: Двухдуговая система роботной
сварки ARCMAN™ для крупных стальных сооружений

Иллюстрация 2: Система роботной сварки
ARCMAN™ для стрел строительного оборудования
В настоящее время функция контактного считывания заменяет зрение для робота. Она позволяет определить положение свариваемой детали с помощью напряжения, прилагаемого к сварочной проволоке, которое изменяется, когда проволока касается свариваемой детали. Однако у контактного измерения есть изъяны, в частности, недостаточная точность, неприменимость при работе с кромками определенной формы, а также неспособность считывать данные в случаях, когда движение занимает больше времени, чем предполагалось. Чтобы преодолеть эти недостатки, компания KOBE STEEL разработала новую систему, основанную на определении зазора в вершине разделки с помощью созданного компанией уникального регулирующего устройства типа CB и лазерного датчика. В этой статье пойдет речь о функциях и практическом применении функции считывания зазора в вершине кромки с помощью лазерного датчика.
2.Общее описание лазерного датчика
2-1. Преимущества лазерного датчика
Имеются три преимущества применения лазерного датчика в системе роботной сварки.
① Широкое разнообразие соединений
Как показано на Иллюстрации 3, считывание зазора в вершине разделки применяется не только при выполнении обычных швов, таких как V-образный стыковой шов с одним скосом двух кромок и V-образных швов со скосом одной кромки, но и в одиночных швах между закругленными и плоскими элементами и в Т-образных соединениях, на которые не распространяется метод контактного считывания.
② Высокая точность измерений
Поскольку максимальная разрешающая способность лазера составляет 0,1mm или менее, возможно выполнение высокоточных измерений с учетом условий замера и свариваемой детали.
③ Сокращение продолжительности сварочного цикла
Поскольку операция облучения кромок и измерения зазора в вершине разделки с помощью линейно поляризованного лазерного луча выполняется только один раз, продолжительность цикла считывания сокращается. Напротив, метод контактного измерения, представленный на Иллюстрации 4, предполагает повторные операции для измерения детали и считывания зазора в вершине разделки.
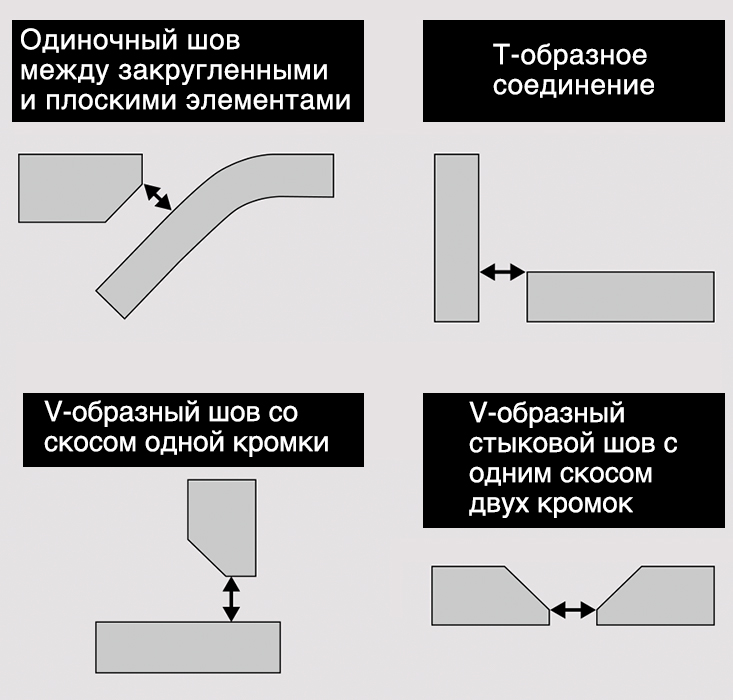
Иллюстрация 3: Формы кромок, для которых
применимо считывание с помощью лазерного датчика
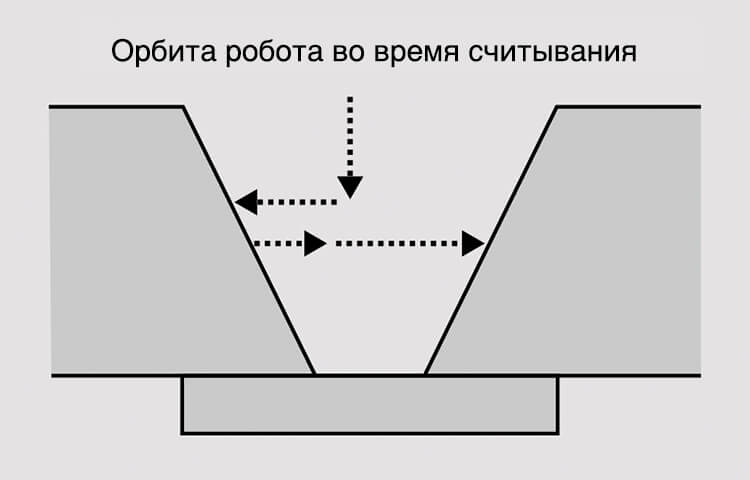
Иллюстрация 4: Измерение зазора в вершине
разделки контактным методом
Орбита работы робота варьируется в зависимости от измерений и состояния детали.
2-2. Недостатки лазерного считывания
Несмотря на все преимущества применения лазерного считывания в системах роботной сварки, широкое внедрение лазерных систем сдерживается рядом проблем.
① Сниженный коэффициент использования мощности
Поскольку лазерный датчик должен быть помещен рядом со сварочной горелкой, чтобы он мог быть установлен на сварочную систему, коэффициент использования мощности робота может снижаться из-за возможного контакта лазерного датчика со свариваемыми деталями.
② Необходимость мер предосторожности
Установка и использование лазерного оборудования требует особых мер предосторожности в соответствии с нормами лазерной классификации, в связи с необходимостью обеспечения защиты людей от вредного воздействия лазерных лучей.
③ Влияние состояния свариваемой детали
Поскольку измерение выполняется за счет отражения лазерного луча от свариваемой детали, состояние ее поверхности и/или любые изъяны могут значительно влиять на конечный результат.
2-3. Способы преодоления недостатков лазерного считывания

Иллюстрация 5: Специально разработанный лазерный
датчик SFK350
Чтобы найти решение вышеперечисленным проблемам, компания KOBE STEEL в сотрудничестве с SERVO-ROBOT INC разработала лазерный датчик SFK350, специально спроектированный для использования с системами роботной сварки ARCMAN™. Ниже пойдет речь о том, как SFK350 (см. Илл.5) позволяет повысить производительность лазерных датчиков.
① Компактный размер позволяет использовать SFK350 в тесном пространстве.
В Таблице 1 приведено сравнение размеров специально разработанной модели SFK350 и обычного лазерного датчика. Очевидно, что размер SFK350 меньше примерно на 50%, а вес - примерно на 10%, что, несомненно, позволяет ограничить снижение коэффициента использования мощности.
| SFK350 | Обычный лазерный датчик |
|
|---|---|---|
| Объем (cm3) | 368 | 749 |
| Вес(g) | 600 | 670 |
② Меньше ограничений по нормам лазерной классификации
В соответствии с требованиями безопасности для лазерных приборов (JIS C 6802: 2018), обычный лазерный датчик определен как лазер класса 3B, что предполагает требование изоляции рабочего оборудования, тогда как специально разработанная модель SFK350 относится к лазерам класса 2M, для которых такое требование отсутствует, что позволяет более широко применять эту систему.
В Таблице 2 приведена выдержка из "Рисков, связанных с использованием лазерных лучей и мер их предотвращения", предоставленная для сведения главой Бюро стандартов Министерства здравоохранения, труда и социального обеспечения Японии.
| Класс 2M | Класс 3B | |
|---|---|---|
| Защитные приспособления ・Защитные очки ・Рабочая одежда с минимальным оголением кожи |
Не требуется | Требуется |
| Периферальная изоляция | Не требуется | Требуется |
| Установление зоны лазерного контроля | Не требуется | Требуется |
| Назначение специалиста по лазерной безопасности | Не требуется | Требуется |
Поскольку обычный лазерный датчик обладает мощным лазерным лучом, он относится к классу 3B и при его использовании требуется соблюдение целого ряда мер безопасности. Помимо периферальной изоляции, необходимо использование защитных приспособлений, установление особой зоны лазерного контроля и присутствие специалиста по лазерной безопасности.
Спецификации SFK350 перечислены в Таблице 3. Лазерный датчик с функцией лучевого считывания зазора в вершине разделки, заключен в прочную оболочку, способную выносить любые условия сварки. Более того, алгоритм измерения рабочей поверхности деталей из стальных пластин средней и большой толщины, которые выпускает компания KOBE STEEL, запрограммирован для любой конфигурации разделки кромок.
| SFK350 | |
|---|---|
| Лазерная классификация | Класс 2M |
| Тип измерений | Обнаружение шва |
| Измерения (ширина x высота x глубина) | 63mm x 139mm x 42mm |
| Глубина поля | 350mm |
| Удаление | 200mm |
| Ближняя плоскость (Поле зрения) | 39mm |
| Дальняя плоскость (Поле зрения) | 111mm |
| Поперечное разрешение | 0,07mm (@350mm) |
| Глубинное разрешение | 0.48mm (@350mm) |
③ Сокращение воздействия состояния поверхности рабочей детали
При лазерном считывании проводится сканирование для снижения воздействия состояния поверхности рабочей детали. Налипание частиц сварочного дыма или разбрызгивания на поверхность детали или на внутреннюю поверхность разделки кромок, а также царапины нанесенные во время обработки и монтажа, могут вызвать изменение видимой формы кромок в определенной точке, что в свою очередь, приводит к неточностям в измерениях, когда замер с помощью лазерного датчика производится только в одной точке.
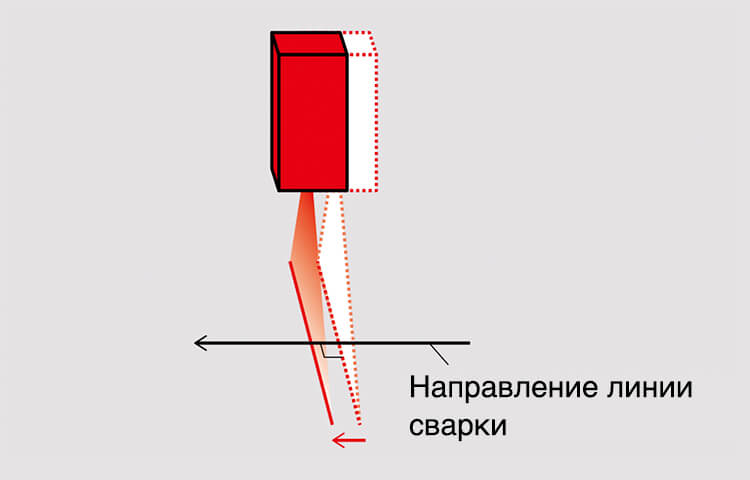
Иллюстрация 6: Сканирование лазерным датчиком
По этим причинам (как показано на Илл. 6), лазерный датчик сначала выполняет сканирование определенного отрезка по направлению линии сварки, чтобы получить данные для замера, по которым потом выводится среднее значение, что снижает вероятность использования ошибочных измерений.
2-4. Сравнение лазерного считывания и контактного считывания
В Таблице 4 приведено сравнение лазерного считывания и контактного считывания. Поскольку оба эти метода имеют преимущества и недостатки, необходимо прежде всего определить, применимо ли лазерное считывание для конкретной детали.
| Лазерное считывание | Контактное считывание | |
|---|---|---|
| Применимые соединения | Много | Мало |
| Разрешающая способность | 0,1mm или менее | Около 0,5mm |
| Время считывания | Около 1 sec. (время сканирования) | Около 10 (время распознавания) |
| Влияние на коэффициент использования мощности | Да | Нет |
| Влияние состояния поверхности | Влияние отражения | Влияние непроводящих деталей |
| Влияние помех | Прямые солнечные лучи Свечение дуги | Нет |
| Точность (т.е. разница в размерах и условиях работы между рабочей деталью и чертежом) | Необходимо для добавления размеров и измерений рабочей детали в соответствии с условиями работы. | Одни и те же настройки могут применяться даже при наличии определенного разброса. |
| Себестоимость | Высокая | Низкая |
Примечание: синим шрифтом выделены преимущества
3.компонента системы
Система лазерного считывания состоит из лазерного датчика, робота ARCMAN™ и регулирующего устройства CB, показанного на Иллюстрации 7.
При выполнении лазерного считывания, данные о разделке кромок свариваемой детали направляются с контролирующего устройства CB на лазерный датчик, а затем проводится считывание с помощью алгоритмов, основанных на данных о разделке кромок. Контролирующее устройство CB получает результаты измерений лазерного датчика, в частности, расстояние до центра разделки, величину зазора в вершине разделки (или ширину зазора) и прочие характеристики данной кромки. Собранная информация выводится в виде результатов лазерного считывания на экран подвесного пульта обучения, как показано на Иллюстрации 8.

Иллюстрация 7: Компоненты системы лазерного
считывания
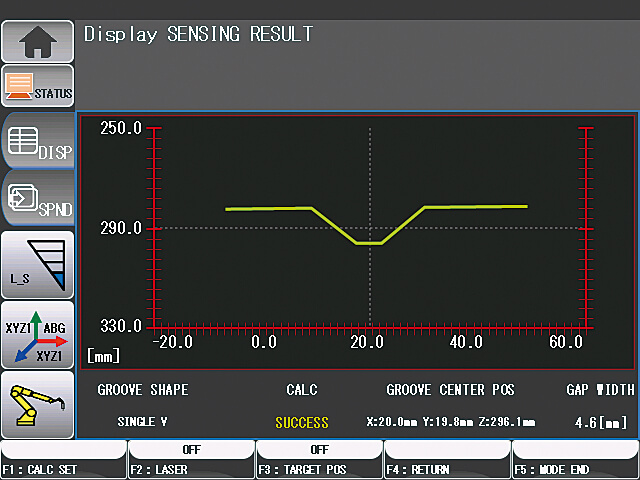
Иллюстрация 8: Экран с данными лазерного считывания
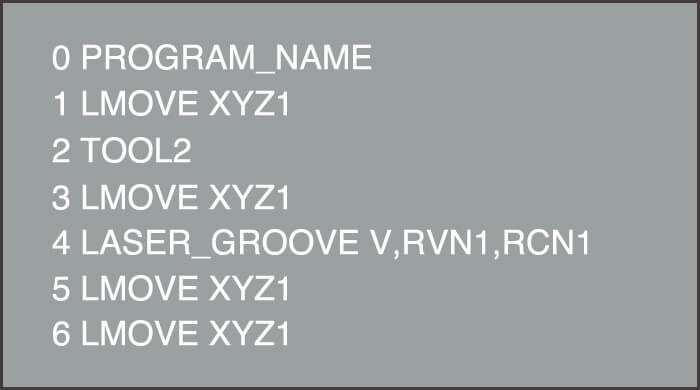
Иллюстрация 9: Обучающая программа лазерного
считывания
Обучающая программа создается с использованием специально запрограммированных команд для лазерного считывания (см. Илл. 9). Следует отметить, что лазерное считывание складывается из трех операций (функций): лазерного облучения, измерения и получения результатов. Хотя возможно использование более чем одной команды в сочетании с универсальной командой для каждой функции, возможно и выполнение лазерного считывания путем выполнения одной специально запрограммированной команды.
Детальные данные по трем следующим пунктам:
① Конфигурация разделки кромок или номер алгоритма для замера
② Место хранения корректировочных данных, полученных считыванием лазерным датчиком
③ Место хранения данных считывания зазора в вершине разделки, полученных лазерным датчиком
Функция распознавания зазора в вершине разделки в сочетании с измерением зазора в вершине разделки и роботными функциями позволяет выполнять сварку в условиях, откорректированных в соответствии с данными измерений зазора. Подробное описание метода обучения робота приводится в инструкции по эксплуатации лазерного датчика SFK350l.
4.Способствование повышению качества сварки
Функция считывания зазора в вершине разделки является важным фактором в повышении качества сварочных работ, так как она автоматически подстраивает параметры сварки в соответствии с результатами считывания зазоров, которые могут различаться в разных точках разделки. Изменения величины зазора в вершине разделки следует измерять заранее перед выполнением сварки.
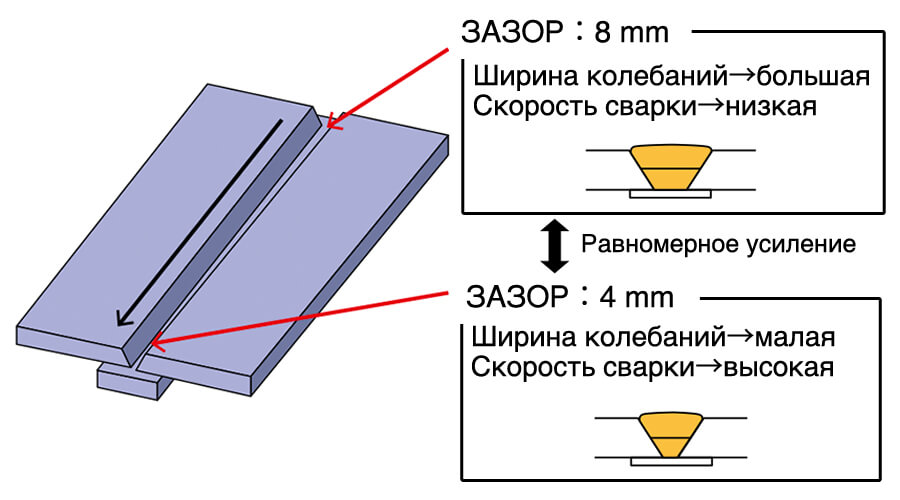
Иллюстрация 10: Функция считывания зазора в
вершине разделки
На Иллюстрации 10 показан зазор в вершине разделки со скосом в кромке, размер которой меняется от 8 mm до 4 mm. В этом случае обучение программируется с данными о зазоре в 4mm.
Даже если зазор вершины разделки кромок свариваемой детали отличается от заданного для обучающей детали, ширина колебаний и скорость сварки автоматически регулируются для обеспечения равномерного усиления шовного валика.
5.Послесловие
В этой статье говорилось о функции считывания зазора в вершине разделки, которая позволяет системам роботной сварки выполнять сварочные работы более высокого качества. В частности, в статье был рассмотрен ряд различий между лазерным считыванием и контактным считыванием, особенности обоих методов, а также приведены примеры их практического применения.
В основу разработки этой функции легли следующие две добавленные характеристики:
①Специально запрограммированная команда для лазерного считывания
② Экран для выведения данных считывания
Эти функции упрощают работу системы роботной сварки ARCMAN™ с установленным лазерным датчиком.
Компания KOBE STEEL продолжит вести разработку подобных приборов с тем, чтобы все наши пользователи могли в полной мере эффективно применять системы роботной сварки.
1. JIS C 6802: 2018, Безопасность лазерных приборов;
Японский промышленный стандарт (Февраль 2005)
2. Уведомление главы Бюро стандартов при Министерстве здравоохранения, труда и социального обеспечения Японии No. 0325002 (Март 25, 2005)
3. Инструкция по применению функции лазерного считывания (для SFK350) Глава 2, Колонка 1 - Метод обучения команде обнаружения зазора в вершине кромки, KOBE STEEL, LTD.
ТОВАРЫ
- Основные товары
- Сварочные материалы
- Система дуговой сварки
- промышленность - Рекомендуемые материалы
- Cварка руководство Быстрый просмотр
- Обзор продукции и основные товары
- для жаропрочной стали
- для нержавеющая сталь
- Для низких температур
- Выделение продукта
- Каталоги
- Технические новинки
- Сертификация
- SDS ※English Only
- ARCMAN
- Сварочный робот
- Программное обеспечение