- PÁGINA PRINCIPAL >
- PRODUCTOS >
- Técnica Destacada >
- Vol.22: Sistema de soldadura robótica ARCMAN™ para montaje del casco en la construcción naval
Técnica Destacada Vol.22
Vol.22: Sistema de soldadura robótica ARCMAN™ para montaje del casco en la construcción naval

1.Introducción
El área de Negocios de Soldadura de Kobe Steel, brinda a sus clientes excelentes productos y servicios para el respaldo de las actividades del “Monodzukuri” (sistema de producción innovadora), con el objetivo de continuar siendo la compañía más confiable para soluciones de soldadura total en el mundo. De acuerdo con nuestro último plan de gestión a mediano plazo correspondiente al 2016-2020, la automatización de la soldadura para la industria de la construcción naval, ha progresado como una solución comercial.
En muchas industrias, incluyendo la construcción naval, se está experimentado la creciente falta de soldadores cualificados, lo cual es una preocupación creciente, ya que se produce el retiro de soldadores de edad, sin atraer a soldadores jóvenes. En consecuencia, urge la necesidad por trabajadores con múltiples calificaciones y/o sistemas de ahorro de la mano de obra, para de ésta manera, aumentar la eficiencia de la producción.
En este artículo se discutirá un nuevo sistema de soldadura robótica para el montaje del casco en la construcción naval, para el aumento de la productividad.
2.Características de un sistema robótico de soldadura para el montaje del casco
2.1 Sistema robótico de soldadura ARCMAN™
Casi todos los grandes barcos de acero ensamblados en los últimos años, han sido construidos por el método de ensamblaje por bloques.
La construcción de bloques implica dividir el navío planeado en varios bloques, prefabricando los bloques en una planta de ensamblaje de un astillero (Figura 1), antes de colocarlos en un muelle o una rampa. La prefabricación de cada bloque o sección de un buque, incluye corte de acero, procesamiento y acabado del subconjunto en una línea de ensamblaje, antes de que el bloque se mueva a un muelle o una rampa para la unión de los bloques.
La figura 2, muestra una vista en perspectiva de los bloques unidos y las líneas de soldadura dentro de los bloques (área circundada), que están situadas en las partes paralelas (excepto en las partes curvas) de un buque.
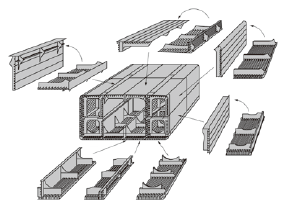
Figura 1: Diseño esquemático del montaje y sub-montaje en la prefabricación de un bloque para casco
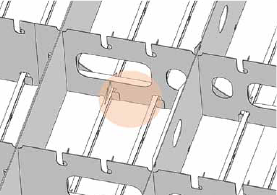
Figura 2: Vista en perspectiva de los bloques unidos y las líneas de soldadura dentro de los bloques
El sistema robótico de soldadura ARCMAN™ ha sido diseñado para ser utilizado en espacios cerrados, dentro de los bloques de la parte paralela del navío. En la Figura 3 se muestra una disposición de robots ARCMAN™.
Un importante factor del diseño es que el robot debe encajar en el estrecho espacio dentro del bloque. Por tal motivo, el nuevo robot es lo suficientemente pequeño para ser instalado y se puede utilizar para soldadura en un espacio tan pequeño como el que se muestra en la Figura 4.

Figura 3: Disposición de robots ARCMAN™

Figura 4: Robot ARCMAN™ extremadamente pequeño y el robot-carry (el conjunto ARCMAN™) para espacios reducidos
El robot de tamaño reducido ARCMAN™, está instalado en un equipo de transporte “robot-carry”, diseñado para ser ligero, facilitando su traslado. El robot y el robot-carry (en lo sucesivo llamado el “conjunto ARCMAN™”) está enganchado a una grúa y puede ser transportado entre los bloques, como se muestra en la Figura 5. El conjunto ARCMAN™ se baja dentro del bloque, hasta que el equipo de transporte toca la placa inferior. El equipo de transporte, establece su posición mediante un dispositivo de posicionamiento automático. Posteriormente, el robot selecciona el programa objetivo e inicia la soldadura.
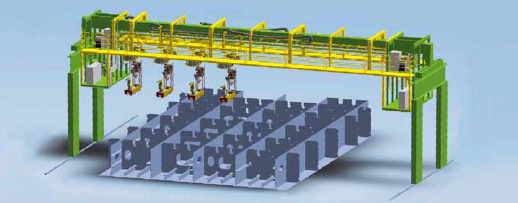
Figura 5: Conjunto de robots The ARCMAN™ y robot-carry (el conjunto ARCMAN™) para un bloque
El nuevo controlador del robot de soldadura, es el denominado “tipo CB”, que tiene más funciones, es más fácil de operar y funciona mejor que los controladores convencionales. Algunas de las características notables, incluyen la tecnología de detección de arco, que permite el rastreo de la distorsión causada por el calor de la soldadura (una de las ventajas más competitivas del ARCMAN™), tecnología para el control de la amortiguación de las vibraciones, gran cantidad de condiciones de soldadura preinstaladas, operatividad más sencilla y excelente capacidad de respuesta de la consola de programación. La mejora de la seguridad y las características de mantenimiento, además de extras, como deslizadores y posicionadores, que permiten la integración con otros sistemas, añaden atractivo al sistema ARCMAN™.
Las Figuras 6 y 7 respectivamente, muestran el conjunto ARCMAN™ siendo transportado al lugar en que se va a utilizar enganchado en una grúa, para luego establecer su posición con el dispositivo de posicionamiento automático, después de haber descendido hasta la placa inferior.

Figura 6: El conjunto ARCMAN™ se transporta a un lugar en el que se va a utilizar, mientras que se engancha a una grúa.

Figura 7: Después de haber descendido hasta la placa inferior, el conjunto ARCMAN™ fija su posición.
Las Figuras 8 y 9 respectivamente, muestran la operación de soldadura en el lugar de operación real.

Figura 8: El conjunto ARCMAN™ inicia la soldadura.

Figura 9: El conjunto ARCMAN™ en proceso de soldadura.
2.2 Usos del sistema de soldadura robótica ARCMAN™
El sistema de soldadura robótica ARCMAN™ ha sido diseñado para ser utilizado en un espacio encerrado por un elemento longitudinal y uno transversal, como se muestra en la Figura 10.

Figura 10: Espacio cerrado para la aplicación del sistema de soldadura robótica ARCMAN™
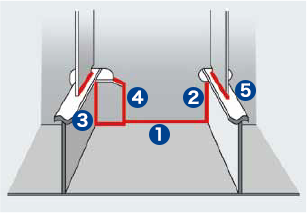
Figura 11: Ilustración de las líneas de soldadura dentro de un espacio tal como en la Figura 10
La Figura 11 ilustra el espacio reducido que se muestra en la Figura 6, con números del ❶ al ❺ que representan las líneas de soldadura, que serán soldadas por el sistema ARCMAN™.
❶ Soldadura de filete horizontal entre una placa inferior y un elemento transversal, así como también entre una placa inferior y una placa voladiza.
❷ Soldadura de filete vertical ascendente entre la banda de un elemento longitudinal en forma de T y un elemento transversal.
❸ Soldadura de filete vertical ascendente entre una placa voladiza y la banda de un elemento longitudinal tipo T.
❹ Soldadura de filete vertical ascendente entre una placa voladiza y un elemento transversal.
❺ Soldadura de filete horizontal entre un refuerzo y la superficie de un elemento longitudinal de tipo T.
La soldadura ascendente vertical de la banda de un elemento longitudinal (❷ y ❸ en la figura 11) y la soldadura horizontal de un refuerzo (❺ en la figura 11), pueden tolerar un espacio de hasta 5 mm. En todas las esquinas de las líneas de soldadura y en la soldadura de encajonamiento (ver Figura 15) está programada para ser aplicada.
2.3 Software de programación: SMART TEACHING™
En la parte paralela de un buque, muchos elementos lineales están instalados en paralelo. Sin embargo, aunque son similares, sus tamaños son tan diferentes que el sistema ARCMAN™ no puede programarse de la manera típica de programar los robots. Por otro lado, al integrar los datos de los modelos 3D, se ha desarrollado un método eficaz de programación.
En la actualidad, los modelos 3D son comunes en muchas industrias, incluyendo la construcción naval, donde el diseño 3D se ha utilizado para identificar elementos estructurales que presentan problemas, además para comprobar si un elemento interfiere con otro.
El software de enseñanza en línea "SMART TEACHING™", que ha sido desarrollado para el conjunto ARCMAN™, utiliza modelos 3D de bloques de buques para la programación de robots. El conjunto ARCMAN™ puede crear fácilmente un programa de programación de robots con datos de modelos 3D en tres pasos:
(1) Cargando datos del modelo 3D
(2) Selección automática de la línea de soldadura que se va a soldar, dentro de un espacio cerrado de un bloque del navío
(3) Programación del sistema de enseñanza del robot
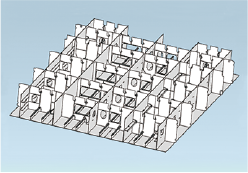
Figura 12. Típico modelo 3D
Para los datos del modelo 3D, se utiliza el versátil formato STEP ("Estándar del modelo de datos para intercambio de productos) en lugar de CAD, para mantener la flexibilidad. La Figura 12 muestra un típico modelo 3D.
Para extraer una línea de soldadura particular a partir de múltiples líneas, el programa analiza y utiliza la información de una cierta forma de un espacio en los datos del modelo 3D, utilizando el versátil formato STEP mencionado anteriormente. El programa estudia las formas en cada espacio cerrado, y reconoce las intersecciones hechas por los elementos longitudinales y transversales como uniones de soldadura de filete que se van a soldar.
Los datos de coordenadas en relación con la junta, así como la forma del espacio cerrado, se acumulan como los datos de información de soldadura de una línea particular de soldadura. En la Figura 13 se indica cómo el software muestra los datos de una línea de soldadura seleccionada y la forma de un espacio cerrado.
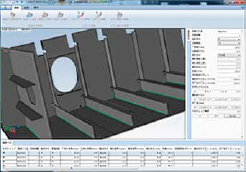
Figura 13: La interfaz de software muestra la línea de soldadura seleccionada y la forma del espacio cerrado
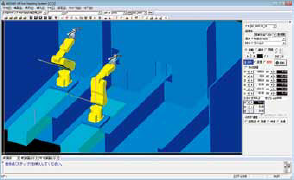
Figura 14: Simulación de soldadura del programa de programación del robot
El programa de enseñanza del robot se prepara como sigue:
(1) Los puntos de inicio y fin de la soldadura, se establecen en base a los datos de información de soldadura.
(2) Se preparan los movimientos del robot para realizar la soldadura.
(3) Se introducen movimientos adicionales, tales como la detección táctil correspondiente a la forma del espacio cerrado.
(4) Se selecciona los parámetros de soldadura de acuerdo a la forma del espacio cerrado y la posición de la soldadura.
Después que el programa de enseñanza del robot está preparado, el software puede mostrar la simulación del programa (ver la Figura 14)
Debido a que es difícil usar el software para calibrar los errores de posición entre las posiciones designadas por el programa de enseñanza y las posiciones reales de la pieza de trabajo, se instala un dispositivo de posicionamiento en equipo de transporte “robot-carry”.
Una vez que el programa de enseñanza se ha introducido en cada robot, la soldadura se puede iniciar en cualquier momento.
2.4 Soldadura
De todas las etapas del proceso de construcción naval, el montaje requiere la mayor cantidad de soldadura y representa más del 50% del consumo total de consumibles de soldadura. En cuanto a los consumibles de soldadura, los hilos tubulares de tipo rutílico (FCWs), representan la mayor cantidad de consumo.
Los FCWs representativos de Kobelco para la construcción naval, son  DW-100 y DW-100V. Ambos son para toda posición de soldadura, aunque este último es particularmente excelente en la brecha de resistencia de la soldadura ascendente vertical.
DW-100 y DW-100V. Ambos son para toda posición de soldadura, aunque este último es particularmente excelente en la brecha de resistencia de la soldadura ascendente vertical.
Una serie de pruebas que comparan el rendimiento de estos dos FCWs en la soldadura robótica de un navío, han dado como resultado que DW-100 sería la mejor opción en la soldadura de filete horizontal y vertical, así como en la soldadura de filete horizontal encajonado.
En un conjunto de pruebas, DW-100 proporcionó mejores resultados en relación con la función de rastreo de arco, que es una propiedad fundamental en la soldadura robótica. En las pruebas se examinó el trazado de arco con y sin inclinación; la resistencia a la separación de las juntas, que es común en la etapa de montaje del casco; así como también la resistencia cónica de la separación, en la soldadura en posición vertical.
En otras pruebas, el uso de DW-100 dio como resultado un mejor aspecto del cordón. Esto fue comprobado para los cordones en la conexión entre la soldadura de filete vertical y horizontal, así como en la conexión entre la soldadura filete horizontal encajonado y en la soldadura de filete horizontal (ver Figura 15).

Figura 15: Conexión de soldadura entre soldadura de filete horizontal encajonado y soldadura de filete horizontal

Figura 16: Apariencia del cordón en la soldadura robótica con DW-100
Estas pruebas han demostrado que DW-100 satisface las demandas tanto de soldadura de filete horizontal como de soldadura en filete vertical, así como también de soldadura de filete horizontal encajonado. La Figura 16 muestra la apariencia del cordón cuando se realiza mediante la soldadura robótica con DW-100.
Además, para mejorar la calidad de las soldaduras que se realizan en dirección vertical ascendente, el aumento de la eficiencia de la soldadura vertical ascendente, puede mejorar la soldadura de bloque en conjunto, porque se ocupa una gran cantidad de tiempo en la etapa de montaje de bloques.
Por lo tanto, estos esfuerzos para mejorar la productividad, como acortar el tiempo de detección que corrige los errores durante el montaje de las piezas, el aumento de la velocidad de soldadura y la mejora de la calidad del tratamiento de la brecha de soldadura, son un foco de desarrollo continuo. Por ejemplo, una nueva función de zigzagueo hacia atrás y adelante instalada en el robot ARCMAN™, combinada con el controlador de tipo CB, permite que el voltaje de arco se ajuste de forma independiente, tanto en los lados de los elementos verticales como en los planos. Experimentos de procedimiento de soldadura tales como estos, contribuirán además a mejorar la calidad de la soldadura de filete horizontal.
* : FAMILIARC™, nuestra designación comercial
3.Planes para el futuro
En marzo de 2014, cinco compañías norteamericanas, AT&T, Cisco Systems Inc., GE, Intel e IBM, crearon el Consorcio para la Promoción de la Internet Industrial (Industrial Internet Consortium IIC) para crear estándares relacionados con el Internet de las Cosas (IoT). Posteriormente se han unido otras empresas y organizaciones en los Estados Unidos, Alemania y Japón.
Estas compañías tienen como objetivo promover la automatización y la productividad a través de la operación remota de la maquinaria, mientras se recopilan los datos operacionales a través de sensores y redes. Otros objetivos son aumentar la eficiencia operativa y disminuir los costos de mantenimiento a través del análisis de datos. Estas tecnologías se establecerán como estándares de facto, ayudando eventualmente a elaborar la plataforma en la que serán instalados los datos de maquinaria y dispositivos de otras compañías.
En octubre de 2016, el Consorcio para Aceleración de IoT (ITAC) en Japón, concluyó memorandos de entendimiento para la cooperación IoT con el Consorcio para la Promoción de la Internet Industrial (Industrial Internet Consortium IIC) de los Estados Unidos.
Se cree que Japón acelerará sus actividades dirigidas a realizar la próxima revolución industrial, mediante el incentivo en el campo de la “Internet de las cosas” (en inglés, Internet of things, abreviado IoT)

Figura 17: Nuevos programas en el controlador tipo CB
Kobe Steel también está apoyando a promover el proceso de informatización. El software AP-SUPPORT™ para respaldo de la producción, permite la visualización de datos operativos, evitando así errores tales como paradas temporales y mejora de la productividad.
Se han instalado nuevos programas en el controlador de tipo CB, que pueden reducir los errores de soldadura al acumular datos operacionales a través del monitoreo del arco y captar detalles de la situación, mediante el uso de cámaras de monitoreo de producción. En la Figura 17 se muestra ejemplos de estos nuevos programas.
4.Epílogo
En este artículo se discutió el sistema de soldadura robótica ARCMAN™ para la etapa de montaje del casco en la construcción naval. El conjunto ARCMAN™ combina un robot de soldadura y un equipo de transporte “robot-carry”, que permite la soldadura en un espacio reducido y estrecho, dentro de los bloques. Además cuenta con un sistema de programación del robot que contiene los parámetros óptimos de soldadura y la información del movimiento del robot.
El sistema ARCMAN™ puede aumentar la eficiencia de las operaciones obstaculizadas por la limitación de mano de obra, además de mejorar la productividad en diversas etapas de soldadura.
Con el objetivo de seguir siendo la compañía líder en soluciones para la soldadura, vamos a seguir desarrollando no sólo nuestra línea de consumibles de soldadura, sino también la tecnologías de línea de panel, tales como sistemas de soldadura robótica para el montaje del casco y sub-montaje.
PRODUCTOS
- Productos Principales
- Consumibles de Soldadura
- Robots de soldadura de arco
- Segmentos Industriales - Materiales Recomendados
- Manual de soldadura Vista rápida
- Vista rápida del producto e ítems destacados
- para acero resistente al calor
- para acero inoxidable
- de baja temperatura
- Características principales del producto
- Catálogos
- Técnica Destacada
- Certificación
- SDS ※English Only
- ARCMAN
- Robot de Soldadura
- Software